
Solution
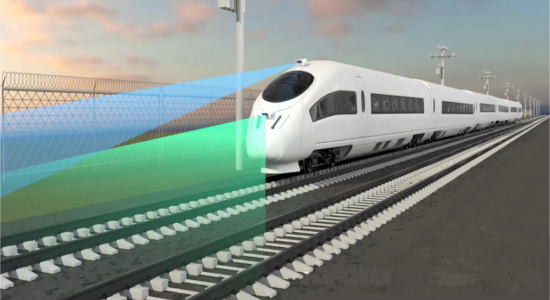
Neuvition's LiDAR-based track obstacle avoidance warning system can precisely identify obstacles and provide early warning for collision avoidance at any moment to guarantee the smooth and safe train operations.
Railway Collision Avoidance Solution
Train, subway, light rail, other rail driving
Recommended models:


Introduction
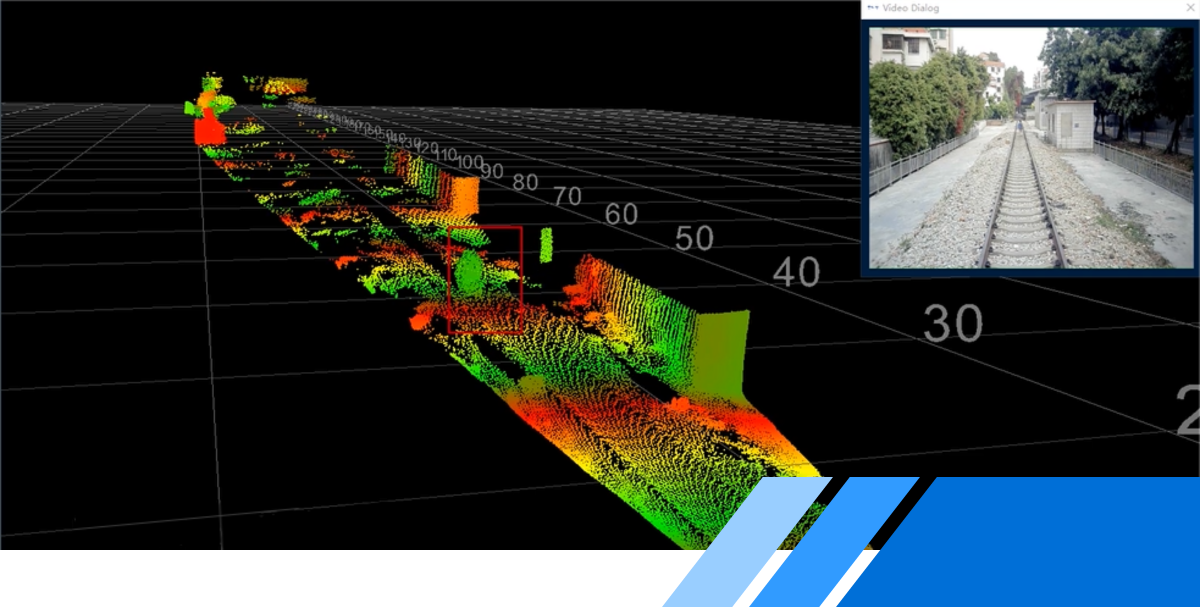
Obstacles on the track have the greatest impact on driving safety. Once collides with obstacle, it will cause a major train accident and cause huge economic losses. Detection of obstacles on the track is a must to ensure driving safety. At present, non-contact obstacle detection technology is mainly based on two types of sensors: LiDAR sensors and vision sensors. The LiDAR is mainly used to detect obstacles on the train route and return the information of the obstacles. The camera determines the position of the rail track and restores the obstacle information detected by the LiDAR to the two-dimensional image. By comparing the position of the obstacle on the image to see whether the projection point falls within the determined rail range is used to determine whether it is an obstacle, and to achieve the purpose of obstacle detection.
Application fields and product characteristics
- It is suitable for forward collision avoidance warning of various medium and low speed vehicles such as trains, subways, light rails, and rail driving;
- Multi-sensor fusion can be realized, such as LiDAR, camera, thermal imaging and other sensors;
- Long detection distance, high scanning accuracy, fast algorithm recognition;
- Automatically send early warning reminders in real time, interconnected with vehicle control system;
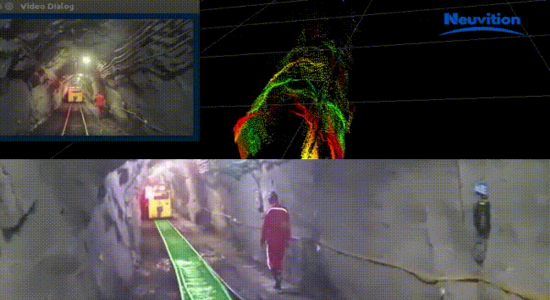
- Strong environmental adaptability, outdoor, tunnel, bad weather, day and night;
Installation Requirements
Ambient temperature: -10℃~50℃; Ambient humidity: 10~80%. There should be shelter above the LiDAR to avoid strong direct sunlight. The LiDAR is installed on the front of the train and scans as parallel to the ground as possible or slightly downward. The height and angle of LiDAR installation should be determined according to situation on site to ensure field of view of the LiDAR can cover the area to be scanned completely. Try not to block the laser emitting window. If you want to install the LiDAR inside the train, you can empty the front windshield size of the laser windows, so as not to affect the imaging and detection effect. It is recommended that the driving speed not to exceed 60 km/h.
Software function
- Multi-sensor fusion, output sensor raw data, structured data or fusion data;
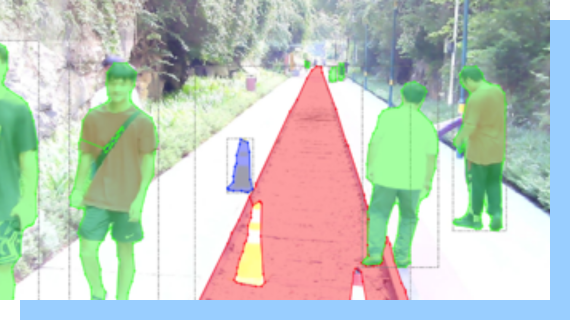
- AI algorithm: identify pedestrians, vehicle types, specified obstacles, etc., machine learning can be performed as needed;
- Integrated GPS (optional), real-time output position and speed, switch between different operating modes;
- Different levels of early warning information transmission mechanism, channels can be customized, real-time and accurate early warning, effectively preventing omission and false alarms;
- Provide SDK and API interface calls, convenient for integrated development, provide also customizable development.
Contact Us
If you have any questions or suggestions, please leave a message, we will get in touch with you within 24 hours!